|
RTD-RAX
1.0.0
|
|
RTD-RAX
1.0.0
|
RTD-RAX is a Python implementation of Reachability-based Trajectory Design (RTD) augmented with formal reachability verification via immrax.
Source code: github.com/evannsm/rtd-rax
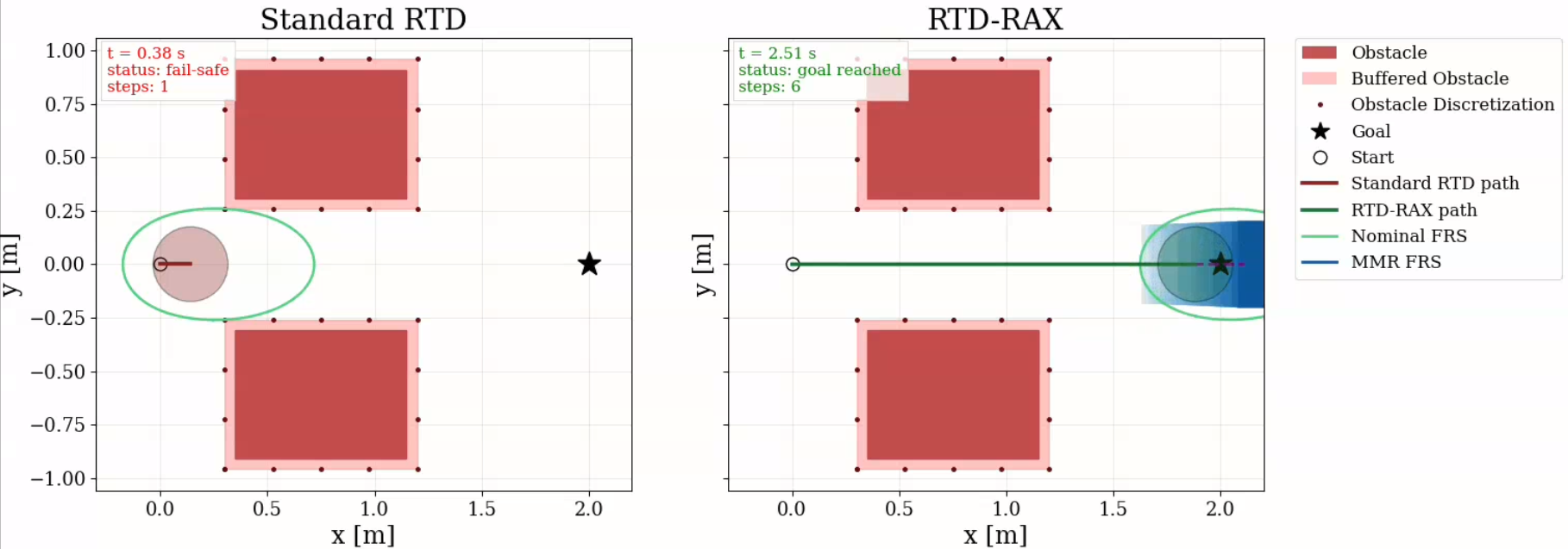
Standard RTD computes parameterized Forward Reachable Sets (FRS) offline and uses them online to solve for collision-free trajectory parameters in real time. However, because high-fidelity system models are too expensive to compute reachable sets for, RTD relies on simplified models and must inflate the FRS to account for the resulting tracking error. This introduces conservatism to the planner, meaning that in many scenarios, RTD fails to find a safe trajectory even when one exists. On the other hand, when tracking error is ignored (the noerror variant), the planner has access to more aggressive and safe trajectories, but loses its safety guarantees by failing to account for discrepancies between the simplified model and the true system. Moreover, because offline reachable set computations cannot account for sources of uncertainty and disturbances, for example, unmodeled dynamics and external disturbances such as wind/ice/slippage, etc., RTD's safety guarantees are only as good as the assumptions made in the offline FRS computation, and thus traditional RTD frameworks can only guarantee in negligible disturbance scenarios.
RTD-RAX closes both of these gaps:
noerror FRS to find candidate trajectories.This produces trajectories that are both less conservative and formally verified safe.
make command interfacemake command interface for easy use and reproducibility