|
RTD-RAX
1.0.0
|
|
RTD-RAX
1.0.0
|
This section describes the four main case studies that demonstrate RTD-RAX's capabilities compared to standard RTD.
The canonical gap scenario places two rectangular obstacles symmetrically about y = 0 at x = 0.75 m, leaving a gap of 0.619 m. This tests whether the planner can find a trajectory through a narrow corridor.
| FRS Version | Tracking Error | Reachable Set | Can Pass Gap |
|---|---|---|---|
standard | Accounted for (conservative) | Larger | No |
noerror | Removed | Smaller | Yes |
The standard FRS is too conservative to navigate the gap. The noerror FRS finds a feasible path, and immrax verification confirms the planned trajectory is genuinely safe under the specified uncertainty.
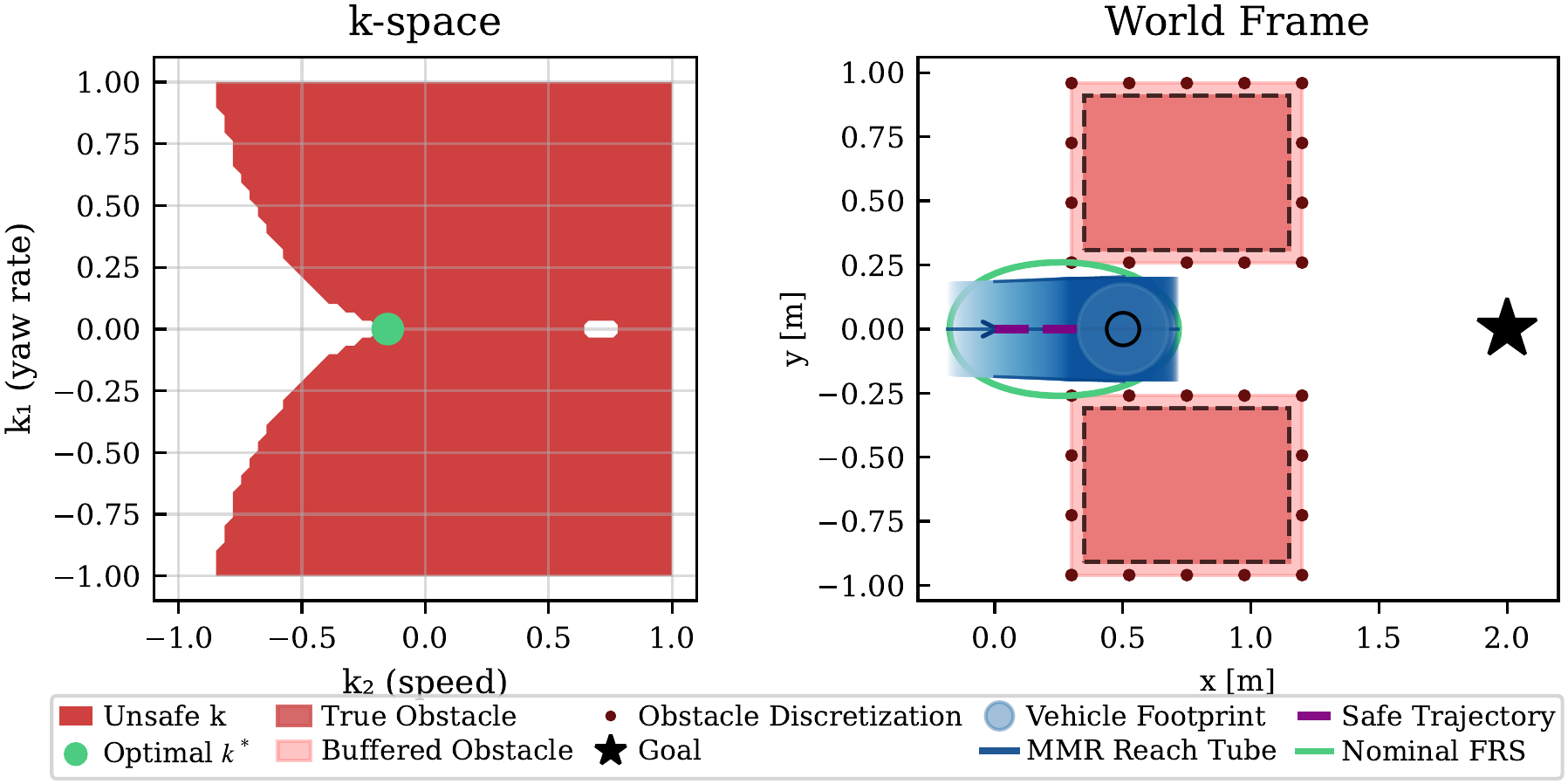
Narrow gap scenario. Left: feasible parameter space (k) (safe: white, unsafe: pink) with selected trajectory (k^{*}) in green. Right: certifiably safe trajectory through the gap.
Animated Case 1 comparison. Left: standard RTD remains infeasible because the conservative FRS blocks the corridor. Right: RTD-RAX uses the noerror FRS plus immrax verification to certify a safe path through the gap.
This regenerates the current saved Case 1 animation and figure family under figures/Study1_Gap/.
This case study uses angled obstacles that require more complex trajectories. The noerror FRS proposes candidates that may be unsafe under uncertainty. immrax catches the collision risk, and the hybrid repair loop finds safer alternatives.
The repair process:
k.k2) and/or CEGIS buffer tightening, then re-verify.
Angled obstacle comparison under shared execution disturbance: Standard RTD succeeds conservatively, Non-Inflated RTD fails to make progress, and RTD-RAX reaches the goal with online Immrax verification and repair.
RTD-RAX repair event in the angled-obstacle scenario: an unsafe candidate tube is rejected, a repaired tube is selected, and execution continues safely to the goal. The gif is paused when a trajectory is rejected/repaired so the repair is evident visually in the animation. In reality it's almost instant 😎.
The Case 2 animate targets save path-length JSON summaries automatically in case_study_outputs/ and in figures/Study2_AngledObs/.
A randomized multi-gap course with disturbance patches compares standard RTD (executing directly under disturbance) against RTD-RAX (noerror FRS + immrax verification with measured disturbance bounds + repair).
| Planner | Outcome | Cycles | Repairs | Mean / p95 Compute |
|---|---|---|---|---|
| Standard RTD | Obstacle collision (cycle 3) | 3 | – | 10.5 ms / 21.9 ms |
| RTD-RAX | Goal reached | 19 | 3 | 10.5 ms / 37.4 ms |
Standard RTD collides with an obstacle on cycle 3 because it cannot account for runtime disturbances. RTD-RAX detects the collision risk via immrax, repairs the trajectory, and reaches the goal safely.
Disturbance comparison: standard RTD (top) hits the first obstacle block early in the rollout because the realized disturbance pushes it into the gate, while RTD-RAX (bottom) uses immrax verification and repair to avoid the block and finish the course safely.